■POINT-1の特徴1
ヘディングセンサー内蔵
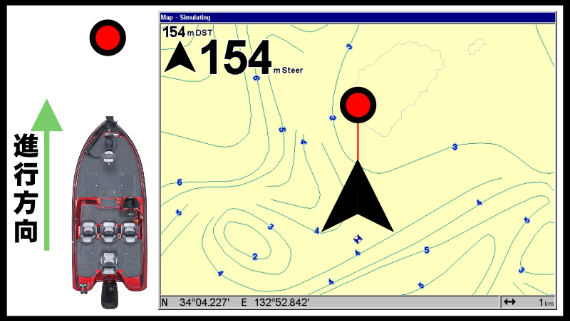
ヘディングセンサーを搭載していないボートの場合
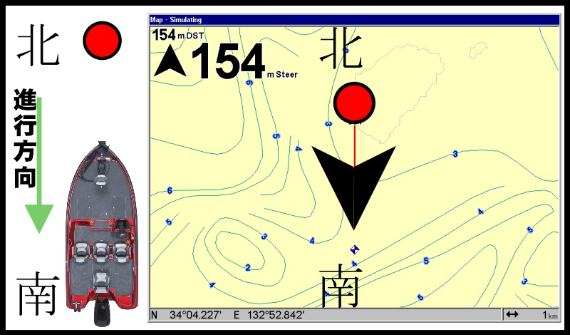
GPS魚探上に表示される方位は、「進行方向(動いた方向)」を表示します
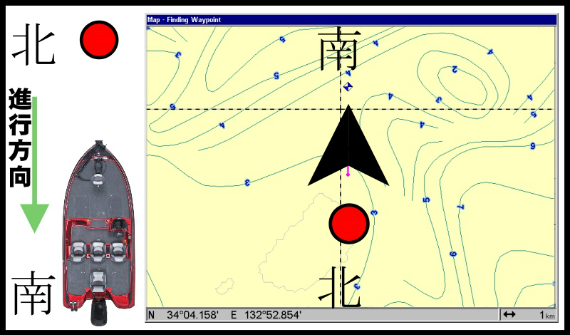
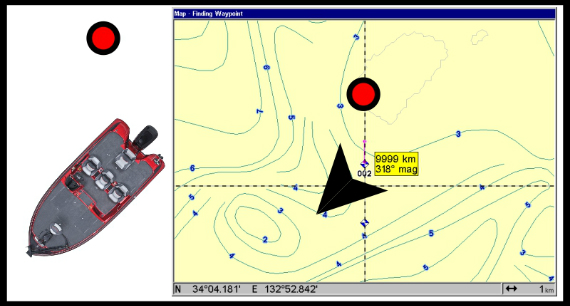
GPSの特性上、船が動いていないとポイントと自船の方位角は導き出せません
また完全に停止している場合ポイントとの相対方位 距離に大きな誤差が生じていしまいます
ヘディングセンサーを接続することにより、GPSで得ることのできなかった停船時の船首方向を示すことが可能です。GPSからの方位信号は多少の時間差がありましたが、ヘディングセンサーは素早く船首方向をキャッチします。
たとえばボートが潮や風で流された場合、ヘディングセンサーで船首方向、GPSから得た自船の位置情報から流される方向を示します。流し釣りに欠かせないアイテムです。
|