電子コンパス高精度GPS /GLONASSレシーバー ●1秒間に10回の座標更新 ●1秒間に10回の方位更新 停止していても船首方位を正確感知 ●NMEA 2000®ネットワーク対応 |
| ■POINT-1の特徴1 ヘディングセンサー内蔵ヘディングセンサーを搭載していないボートの場合 GPS魚探上に表示される方位は、「進行方向(動いた方向)」を表示します ヘディングセンサーを接続することにより、GPSで得ることのできなかった停船時の船首方向を示すことが可能です。GPSからの方位信号は多少の時間差がありましたが、ヘディングセンサーは素早く船首方向をキャッチします。 |
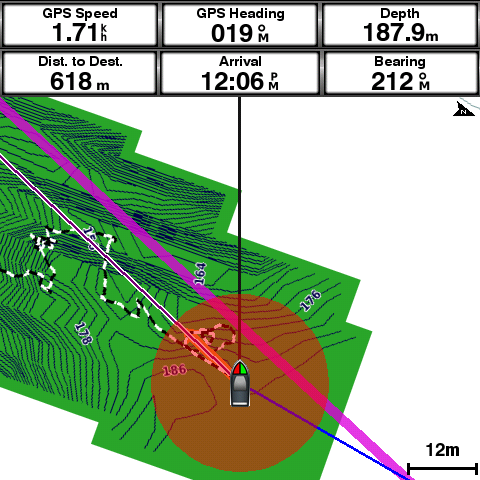
| ■ヘディングセンサーがないボートの場合 GPS魚探上に表示される方位は、「進行方向(動いた方向)」を表示します GPSの特性上、船が動いていないとポイントと自船の方位角は導き出せません そのためGPS魚探を使ったアウトレンジ狙撃ではコツが必要でした ■ポイントの直撃は2つの条件が必須 ●ポイントへの航法をON(ポイントと自船の相対距離方位を見る) ●ポイントへ接近しながらキャスト 停船してはいけない そのため船が、完全に静止した状態では狙い撃ちはできませんでした ■ヘディングセンサー無のGPSは進んで初めて船首方向がわかる 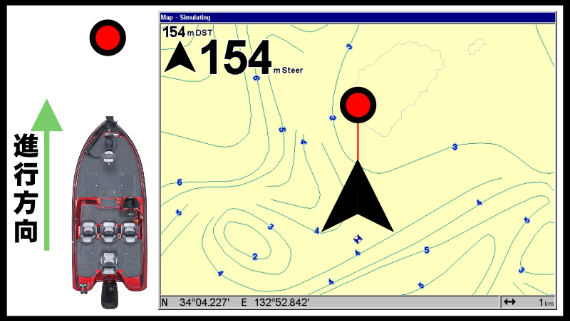 |
| ■ヘディングセンサーがない場合のデメリット ●停船時はGPS上の進行方向がでたらめ ●微速で接近し続けなければポイントを狙えない ●流し釣りでは使いにくい ●地図上の船首と実際の船首があっていない ●ポイントがどこにあるかディスプレイから読み取りにくい 【ノースアップ設定】船が北→南へ流されている場合 実際の船首とGPS上の船首が一致しない 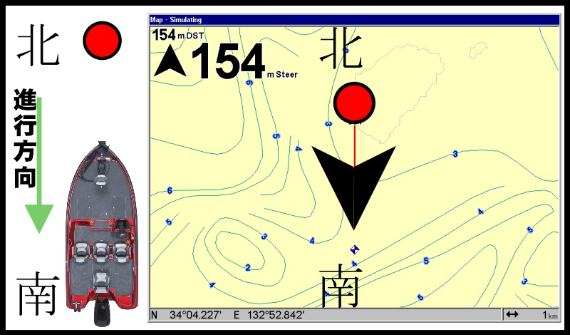 |
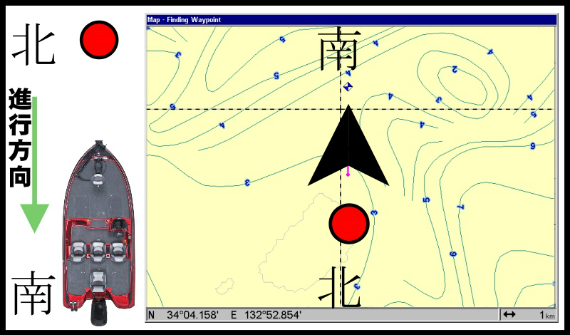
【コースアップ設定】船が北→南へ流されている場合 地図が進行方向が上に来るように回転してしまう 実際の進行方向とGPS上の船首が一致しない 実際には違うのに、あたかも船首がそちらに向いたかのように「△」マークが南側を向いたりボートが流されるたびに、地図が勝手にぐるぐる回転したり GPSの画面をみてボートポジションの維持をするには相当な慣れが必要です
 |
| ■ヘディングセンサーを導入すると ●停船状態で実際の船首 GPS上の船首が完全に一致 ●狙うポイントへの航法を入れる必要はない ●流し釣りがやりやすい ●次々にポイントをアウトレンジ直撃できる GPSと自船の船首が同期することで、GPS上に映し出されるポイントや地形の方位やイメージを勘違いすることなく正確に受け取れます ポイントとの距離把握ボートポジションの維持 正確なキャストでのポイント直撃が誰でもできるようになるのがヘディングセンサーです。 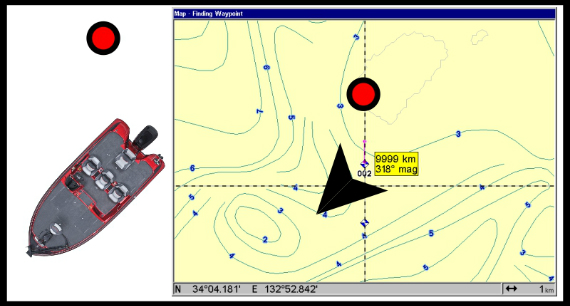 |
| ■外付GPSアンテナLOWRANCE POINT-1を導入する場合の効果
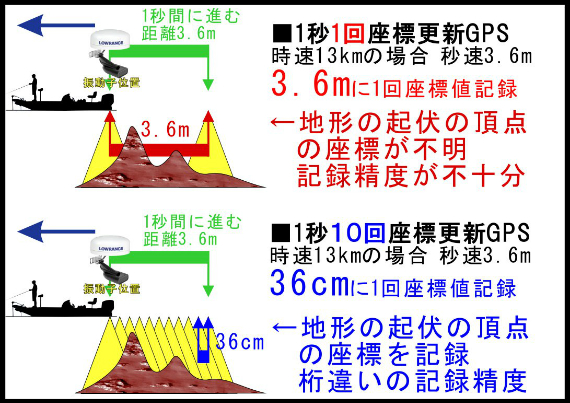
GPS魚群探知機の記録誤差を最小にするにはどうしたらいいのでしょうか まずは記録誤差の構成要素を理解していただく必要があります 記録誤差= このようにいくつかある誤差の構成要素で機器の更新なしで記録誤差を最小化する方法があります。 それは 記録誤差を最小化するにはなるべく低いスピードで航行して記録することです(速度閾値以上) 実際このことを知らずにポイントを記録すると 誤差が拡大します ストラクチャースキャンの最適なイメージング:2-8 mph/3-13キロとされていますが 時速13kmでは船は秒速3.6m移動します。 つまり1秒に1回座標更新するGPSの場合ポイントの記録できる最小単位は3.6mになってしまします。 仮に船の速度を1/10時速1.3kmにすればポイントの記録できる最小単位は36cm刻みにできます したがって、記録時の船の速度を落とすと精度は向上することになります しかし、低速になると、船の進行方向の感知が難しくなって記録誤差が出てしまいます。 ■POINT-1の特徴2 POINT-1はマリンレジャー用GPS最速の1秒間に10回の座標 方位データ更新が可能です。 つまり、1/10秒で座標計算するPOINT-1を使うと時速13kmで航行していても36cm刻みでデータを更新していることになります。 さらに、POINT-1は低速であっても方位検出ができる方位センサー(ヘッディングセンサー)を組み合わさっているので低速でも精度の高い計測が可能です。 時速1.3kmで航行してポイント記録したばあい、最小誤差は3.6cmになります。 POINT1が開発されてきた背景は 広大な範囲を一気にスキャンできるストラクチャースキャンが開発されたことに起因します。 ストラクチャースキャンは自船から左右76m 152m幅のスキャンができます。 しかし、広大な範囲から見つけたポイント中でも、スタンプやアンカーブロックなどの小規模なストラクチャーをGPSで記録することが難しかったですが、これは記録している水中データの座標解像度の問題でした。 POINT-1を使うことで高速でスキャンしても高精度な座標記録ができるようになっていきます。 座標更新速度10倍のPOINT-1を導入することで記録解像度は10倍になります |
■POINT-1 1秒間に10回座標 方位更新するGPSアンテナの効果
 |
| GPS魚探は使用目的や船に応じて最適な機器選択が必要です。 機器選びでわからないことがあれば何でもお問い合わせください ご購入はこちら  |
| Point1に関してはネット等でみると、 低速移動時の不都合等が指摘されており、またその修正としてのファームウェアがアップデートされている ようですが、御社商品に関してはアップデート後の製品なのでしょうか?弊社製品POINT-1は最新にアップデート済みで出荷しています。 ●VER1.4 1.4ソフトウェアパッチは、すべてのユーザーのために必須ではありません。 このアップデートでは、POINT-1が動作している間、一部のユーザーで、GPSがロックしてフリーズする問題が発生したという報告に対応しています 北緯10°~南緯10度の間で使用する場合のGPS機能を向上させるために1.4ソフトウェアパッチを使用します。 ■POINT-1VER1.3の特徴■ POINT-1は2つのデータを出力できます この2つのデータをNMEA2000ネットワーク接続されている機器で ●電子コンパス+GPSの座標信号の両方を使う ということが複数のディスプレイユニットから使用したいデータを自由指定できるようになります。 2台のELITE-7HDIをバスボートに設置して ●フロント ●リア このような使い方ができます。 【POINT-1 VER1.3変更点2】 すべてのNMEA2000®デバイスは ‘インスタンス’と呼ばれる設定があります。POINT-1は、インスタンスを変更すると、自動的に使用優先船順位1として認識されます。 ネットワークに、2つ以上のPOINT-1モジュールがインストールされていた場合 すべてのPOINT-1のインスタンスが0に設定されている場合は、HDSが自動的に検出してどれかを使用します。 POINT-1モジュールのいずれかのインスタンスが1に変更された場合、 【POINT-1 VER1.3変更点3】 【POINT-1を快適に使用するには】 このバージョンから 弊社製品POINT-1はVER1.3にアップデート済みで出荷しています。 また、アップデートはした方が良いのか、その方法をお知りたい場合には |